以下、記念撮影です。まず、シーンの深度マップ。
 |
| 深度マップ |
続いて、シャドウ マップを書き込んだ閉塞マップ。
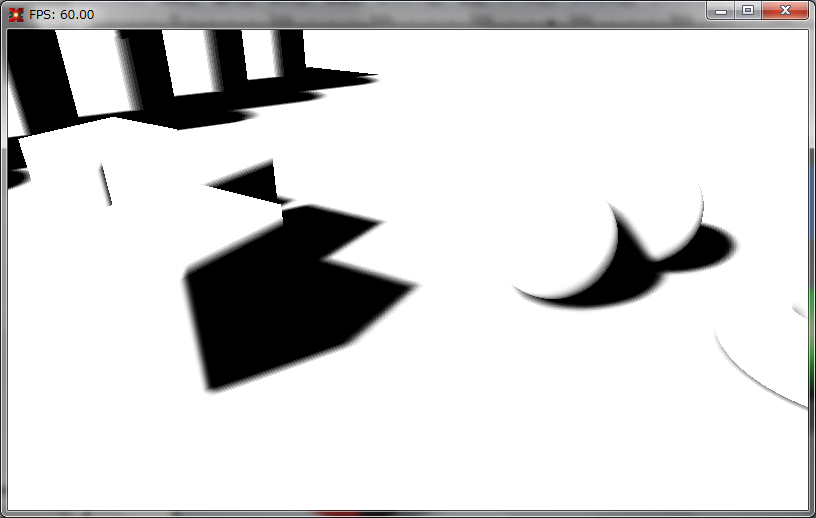 |
| 閉塞マップ |
閉塞マップと呼ぶべきか否か、専門的な名称が分かりませんが、シャドウ マップから得られる深度と、シーンの深度マップから再構築した座標から得られる深度を比較し、ライトが遮られているか否か、すなわち、影があるか否かを描画したシーンです。生成されるテクスチャは SSAO で生成する閉塞マップと同じであるため、関連する機能の一部を共通化して閉塞マップと呼んでいます。
最後に、影を合成した最終シーン。
 |
| 最終シーン |
シャドウ マップ サイズ 1024x1024、PSSM 分割数 3、一般的なライト カメラを使用、PCF 7x7 適用です。
PCF は過去に実装済みでしたが、モデル描画のためのシェーダに実装すると、関連するシェーダの至る所で冗長に記述することになるため、先のシャドウ マッピングの実装では避けていました。今回は、閉塞マップ描画シェーダにのみ記述すれば済むため、あらためて再実装したという所です。
今回の実装は、それ程には難しいものではなかったはずですが、本筋とは関係ない所で長時間ハマってました。定数バッファへ渡す C# 側構造体のレイアウトを誤り、これに気付かずにハマり続けるという失敗を、これまで何度も繰り返しています・・・。
0 件のコメント:
コメントを投稿